.svg)
.svg)


.png)
.png)

.svg)
.svg)
Hunderte Glasvarianten, ein Greifer – FlexibleRoboterautomatisierung in der Glasveredelung mit MATRIX FlexCLAMP
Wieein adaptives Greifsystem den Tampondruck von Trinkgläsern variantenfähig macht– ohne 3D-gedruckte Formbacken, ohne Rüstzeiten, ohne Greiferbahnhof.
Herausforderung: Variantenvielfalt in der Glasveredelung
Trinkgläser gehören zu denAlltagsprodukten, bei denen kaum jemand an Automatisierung denkt – bis man dieProduktionsrealität dahinter sieht. Brauereien, Weingüter, Getränkemarken undGastronomiebetriebe bestellen Gläser mit individuellem Logo, in unterschiedlichenFormen, Größen und Materialstärken. Ein typischer Glasveredler bedient mehrerehundert Varianten – oft 300 bis 400 verschiedene Glastypen, die perTampondruck mit dem jeweiligen Kundenlogo bedruckt werden.
Die Herausforderung liegt dabeinicht im Druckprozess selbst, sondern im Handling: Jedes Glas muss präzisegegriffen, zum Tampondrucker transportiert und dort exakt positioniert werden.Da Glas zerbrechlich ist und die Formen stark variieren – vom schlankenWeizenbierglas über den kompakten Tumbler bis zum bauchigen Weinglas – brauchtes eine Greiflösung, die sowohl flexibel als auch schonend arbeitet.
Hinzu kommt dieLosgrößenstruktur: Viele Kunden bestellen relativ kleine Chargen von 500 bis1.000 Gläsern. Das bedeutet, dass die Produktion häufig wechselt – teilweise mehrfacham Tag. Jeder Wechsel erfordert eine Anpassung des Greifersystems an dieneue Glasform. In der Summe entsteht so ein erheblicher Rüst- undVerwaltungsaufwand, der die eigentliche Produktivität der Linie empfindlicheinschränkt.
Bisheriger Ansatz: 3D-gedruckte Formbacken – und warum er an Grenzen stößt
Viele Glasveredler arbeitenheute mit bauteilspezifischen Formbacken aus dem 3D-Drucker. Für jedeGlasvariante wird ein eigener Backensatz konstruiert und gedruckt, der dieKontur des jeweiligen Glases abbildet. Beim Produktwechsel werden die altenBacken abmontiert und die passenden für das nächste Los eingesetzt. Dasfunktioniert im Grundsatz – aber bei hunderten Varianten wird es zum operativenEngpass:
• Jede neue Glasform erfordert einen neuen Backensatz –von der Konstruktion über den Druck bis zu Test und Freigabe.
• Hunderte Backensätze müssen gelagert, beschriftet,sortiert und wiedergefunden werden.
• Bei jedem Produktwechsel wird die Linie gestoppt, umden Greifer mechanisch umzurüsten – ein Vorgang, der typischerweise 3 bis 5Minuten dauert.
• 3D-gedruckte Backen verschleißen, verspröden unterUV-Einfluss und müssen regelmäßig ersetzt werden.
• Die Fehlbestückung falscher Backen führt zu Ausschuss,Glasbruch oder Fehlpositionierung beim Druck.
In der Praxis bedeutet das: DerGreifer wird zum Flaschenhals einer Linie, die eigentlich für Durchsatzoptimiert ist. Die Automatisierung endet dort, wo die Variantenvielfaltbeginnt.
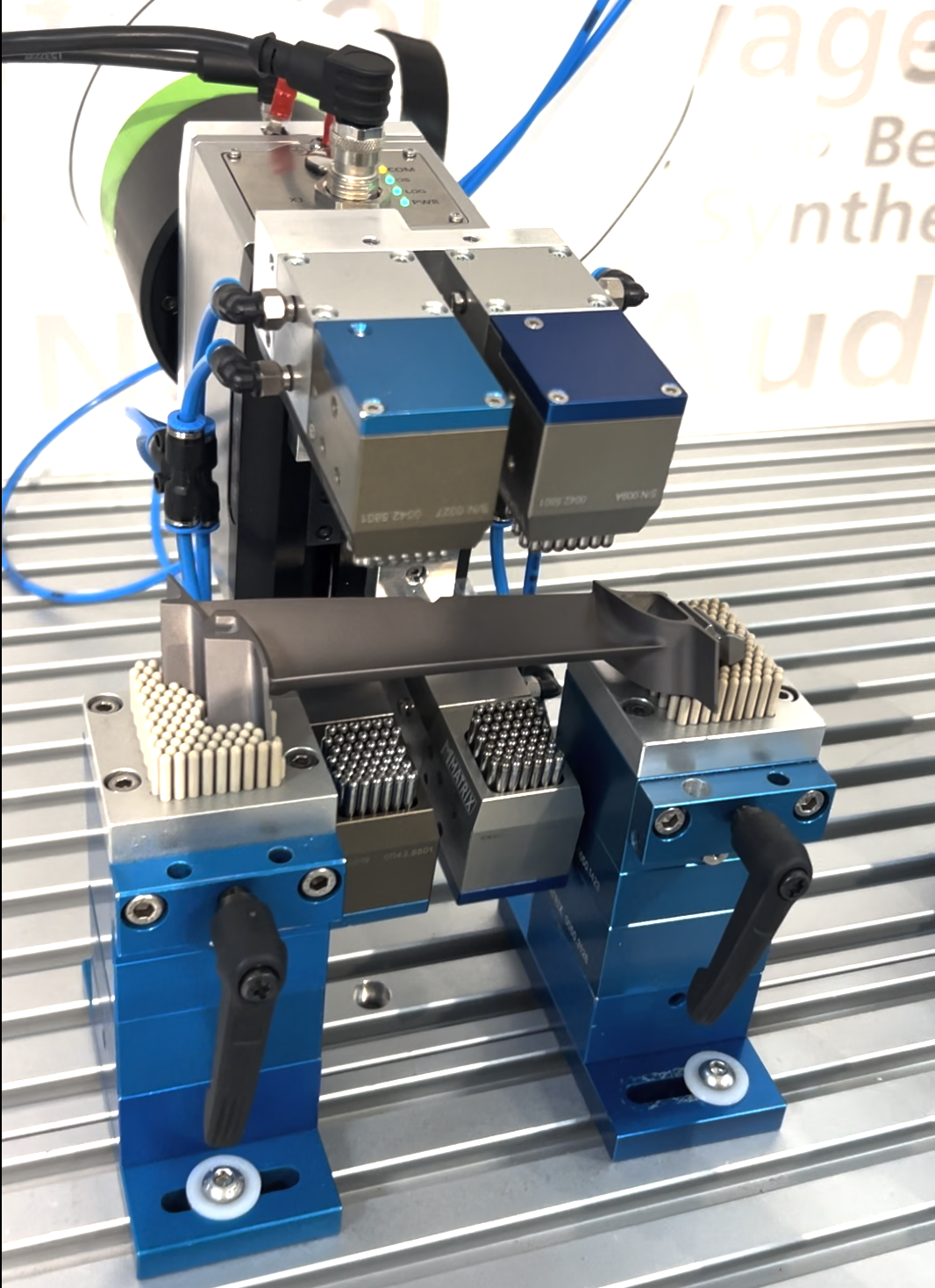
Lösung: MATRIX FlexCLAMP – ein adaptiver Greifer für alle Glasvarianten
Genau hier setzt das MATRIXFlexCLAMP System an. Statt für jede Glasform eigene Backen zu fertigen,passt sich der FlexCLAMP-Greifer über eine Vielzahl gefederter Pins automatischan die jeweilige Glaskontur an – und verriegelt diese Form anschließendpneumatisch. Das Ergebnis ist eine adaptive Greiffläche, die sich bei jedemZyklus neu an das aktuelle Werkstück anformt.
Der Prozess imTampondruck-Handling:
• Anfahren und Anformen: Der Robotergreifer fährtdas Glas an. Beim Schließen legen sich die Pins federnd an die Glaskontur anund bilden eine passgenaue Negativform – ob Stielglas, Maßkrug oder Sektflöte.
• Verriegeln: Die Pins werden pneumatischgeklemmt. Die Kontur ist fixiert, das Glas wird sicher und schonend gehalten.Die drucklose Verriegelung sorgt dafür, dass das Glas auch bei Druckluftausfallnicht herunterfallen kann.
• Transport und Positionieren: Der Roboter bringtdas Glas präzise in die Tampondruckstation und positioniert es für denDruckvorgang. Die gleichmäßige Kraftverteilung über die Pin-Flächen schützt dieempfindliche Glasoberfläche.
• Lösen und nächstes Glas: Nach dem Bedrucken wirddas Glas abgelegt, die Klemmung gelöst – und der Greifer passt sich unmittelbaran die nächste Glasform an. Ohne Rüstung, ohne Backenwechsel, ohne Stillstand.
Der entscheidende Vorteil: Eineinziger Greifer deckt das gesamte Variantenspektrum ab. Ob 50 oder 400verschiedene Glastypen – der FlexCLAMP passt sich an, ohne dass neue Hardwarekonstruiert, gedruckt oder gelagert werden muss. Link zum Video: https://youtube.com/shorts/W5ec63PrtNA
Warum gerade Glas das Prinzip auf die Probe stellt
Glas ist als Greifgut besondersanspruchsvoll: Es ist zerbrechlich, die Oberflächen sind glatt und empfindlich,und die Wandstärken variieren erheblich. Gleichzeitig ist Glas ein Material,das jeder kennt – und jeder weiß intuitiv, wie vorsichtig man damitumgehen muss. Genau das macht diesen Use Case so überzeugend: Wenn einadaptiver Greifer filigrane Trinkgläser sicher und variantenflexibel handhabenkann, dann sind robustere Werkstücke – Metallteile, Kunststoffkomponenten,Gussteile – erst recht realisierbar.
Die Pin-Flächen des FlexCLAMPverteilen die Greifkraft gleichmäßig über die gesamte Kontaktfläche, stattpunktuell hohe Lastspitzen zu erzeugen. Das schützt sowohl die Glasoberflächeals auch eventuelle Beschichtungen oder bereits aufgedruckte Logos. Gegenüberherkömmlichen Greifbacken – die oft nur an zwei oder drei Punkten anliegen –entsteht so eine deutlich schonendere und stabilere Greifssituation.
Prozessvergleich: Formbacken vs. FlexCLAMP
Der Unterschied zwischen demkonventionellen und dem adaptiven Ansatz lässt sich am besten am konkretenProduktwechsel illustrieren:
Konventionell (3D-gedruckte Formbacken):
Linie stoppen → Alte Backendemontieren → Richtige Backen aus dem Lager suchen → Neue Backen montieren →Testlauf → Produktion starten. Dauer: 3–5 Minuten pro Wechsel.
Mit MATRIX FlexCLAMP:
Nächstes Glas einlegen →Greifer schließt und formt sich an → Produktion läuft weiter. Dauer: 0 SekundenRüstzeit.
Bei drei bis fünfProduktwechseln pro Tag und 250 Produktionstagen im Jahr summiert sich dieserUnterschied auf 190 bis 520 Stunden eingesparte Rüstzeit pro Linie und Jahr.Zeit, in der die Linie produziert statt stillsteht.
Business Case: Was die Umstellung konkret einspart
Für einen typischenGlasveredler mit 350 aktiven Glasvarianten und täglichen Produktwechseln lässtsich der wirtschaftliche Effekt konservativ abschätzen:
Kostenposition
Einsparung / Jahr
Wegfall 3D-gedruckter Backensätze (350 Varianten × ca. 40–60 € Druckkosten inkl. Konstruktion)
ca. 17.500 €
Reduzierter Ersatz- und Nachdruckbedarf (Verschleiß, Sprödigkeit, Design-Updates)
ca. 5.000–10.000 €
Wegfall Lagerhaltung und Verwaltung (Platz, Beschriftung, Sortierung, Suche)
ca. 3.000–5.000 €
Reduzierte Rüstzeiten (3–5 Min. × 3–5 Wechsel/Tag × 250 Tage, bewertet mit Maschinenstundensatz)
ca. 15.000–30.000 €
Weniger Ausschuss durch Fehlbestückung und Glasbruch beim Rüsten
ca. 5.000–10.000 €
Geschätzte Gesamtersparnis pro Linie und Jahr
45.000–72.500 €
Hinweis: Die Werte basieren auf konservativenAnnahmen für einen mittelgroßen Glasveredler mit einer Tampondruck-Linie. Beimehreren Linien oder höherer Variantenvielfalt skaliert der Effektentsprechend.
Wirkung über den einzelnen Use Case hinaus
Der Glasveredelungs-Caseillustriert ein Muster, das in vielen Branchen auftritt: Ein Standardprozess(hier: Tampondruck) trifft auf hohe Variantenvielfalt (hier: hunderteGlasformen) – und der Greifer wird zum limitierenden Faktor. Das gleichePrinzip findet sich in:
• Kosmetik- und Pharmaverpackung: Flacons, Tiegelund Flaschen in wechselnden Formen für verschiedene Marken
• Keramik- und Porzellanindustrie: Tassen, Vasenund Gebrauchskeramik mit empfindlichen Oberflächen
• Lebensmittelverarbeitung: Verpackungen undBehälter verschiedener Größen auf einer Linie
• Montage empfindlicher Elektronikkomponenten: Gehäuseund Abdeckungen in vielen Designvarianten
Überall dort, wo High-Mix auffragile oder geometrisch anspruchsvolle Bauteile trifft, bietet ein adaptivesGreifsystem wie FlexCLAMP einen systemischen Vorteil: Die Komplexität wirdnicht durch mehr Hardware gelöst, sondern durch weniger.
Conclusion: From variant warehouse to flexible gripping system
Glass finishing is an example of how an automation problem is changing: It is not the robot or the printing process that is the hurdle — but the handling of diversity. Anyone who works with hundreds of 3D-printed molds today basically manages an analog variant warehouse in a digital production environment.
MATRIX FlexClamp solves this contradiction: A single adaptive gripping system replaces the entire jaw inventory, reduces set-up times to zero and makes the line ready for any new glass shape — without design lead time, without storage space.
For companies with a wide variety of variants and sensitive workpieces, this is not just a technical improvement — it is a change in automation logic: away from a component-specific gripper, towards a universal gripping surface that adapts, locks and ensures process reliability.
If you are currently working with variant-specific grippers, growing jaw bearings or frequent set-up breaks, it's worth taking a look at adaptive gripping strategies — before the next set of molds goes into the 3D printer.
.svg)


.png "Footer Shadow")
